


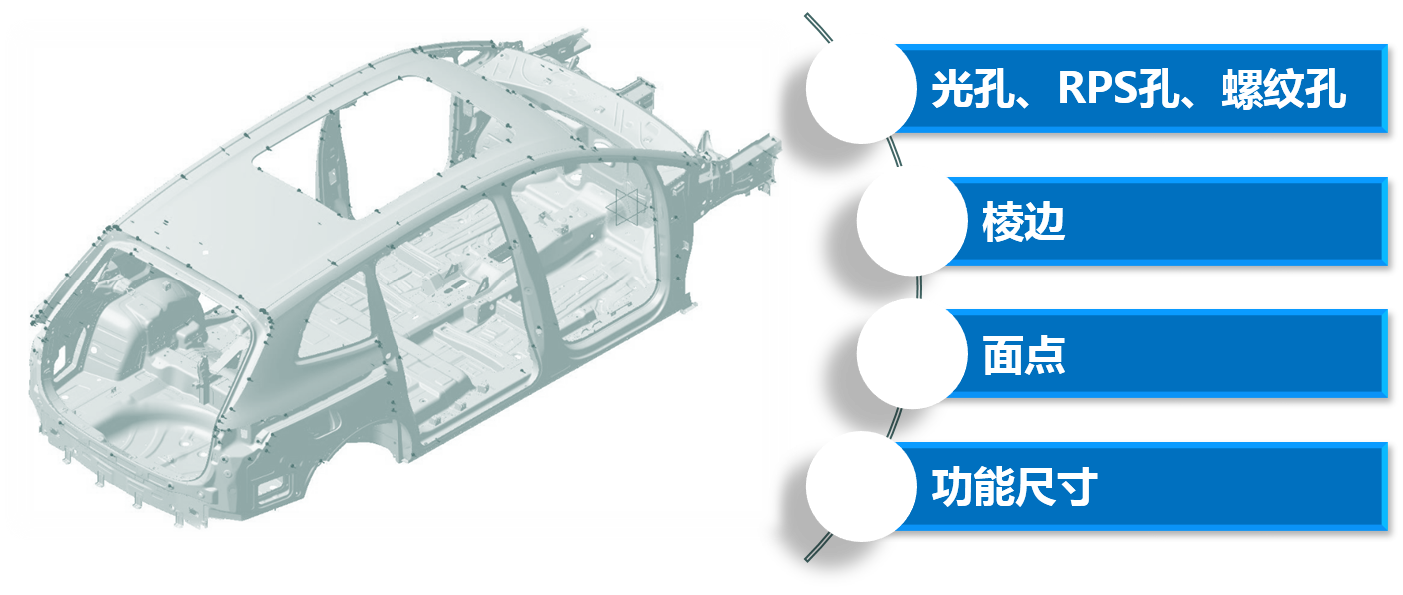
外観検査技術とレーザー測定技術に基づき、三角測量原理をベースに、ロボットのフレキシブルポジショニング上の優(yōu)位性と組み合わせて、測定された特徴の3Dスペース座標を取得し、オンライン非接觸式の寸法精度測定システムを?qū)g現(xiàn)します。當該システムは、車體骨格の精度に影響を與える重要な寸法、例えばフロントガラス窓の寸法、ドアの取付位置の辺の位置、位置決め穴の位置、各サブアセンブリの位置などを測定することができます。また、他の非接觸式で精度が求められる特定のシーンでも使用できます。
同測定システムは測定結果のリアルタイムな表示や誤差オーバーのタイムリーなアラーム提示を?qū)g現(xiàn)でき、さらに測定されたポイントの傾向図、偏差分布、CP、CPK、6Sigma、最大値、最小値、平均値、標準偏差などの統(tǒng)計値をも表示できます。






