


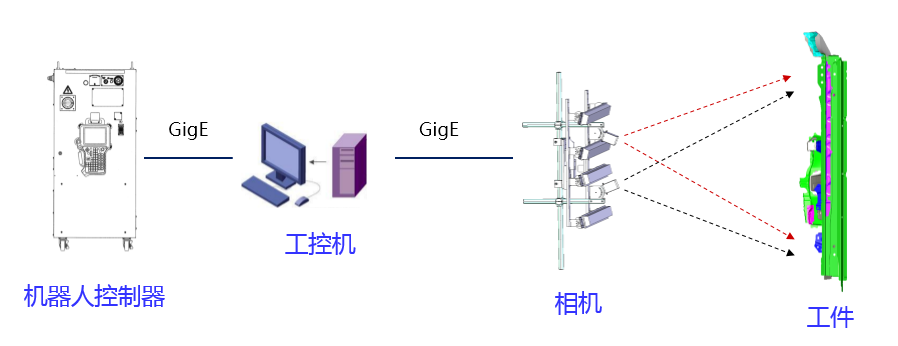
両眼視覚システムは主に2セットのカメラレンズ、光源、畫像処理産業(yè)用パソコンからなり、両眼視覚技術(shù)を利用し、ワークの6自由度の位置決め(X、Y、Zの3方向の位置と角度)を?qū)g現(xiàn)し、偏差を矯正した後に正確につかみ取れるようロボットを誘導(dǎo)し、各種の生産ラインの材料搬送、組立、積み卸しなどに幅広く応用できます。カメラは固定設(shè)置またはロボットクリッパに裝著可能で、その視野が全局をカバーし、拡張可能性が強く、新車種の追加が容易です。
ビジョンの原理:
両眼立體視覚は、二つのカメラによって異なる位置からワークの畫像を収集し、測定されたワークの同じ特徴點に対応する畫像の視差に基づいて深度情報を計算し、最後に、複數(shù)の測定された點の3D位置情報から空間上のワークの位置と姿勢を算出します。