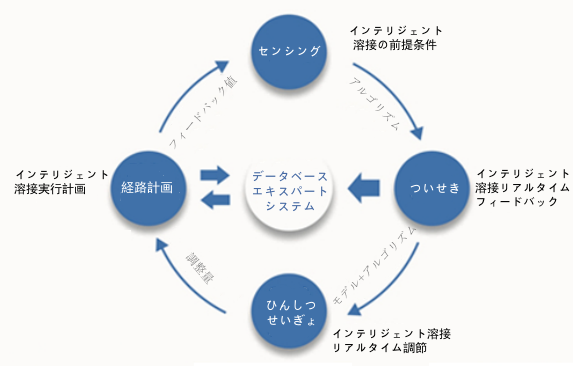



自己組織——専門家システム及び視覚システムのフィードバックに基づいて、溶接軌跡、パラメータの計畫を?qū)g現(xiàn)する。
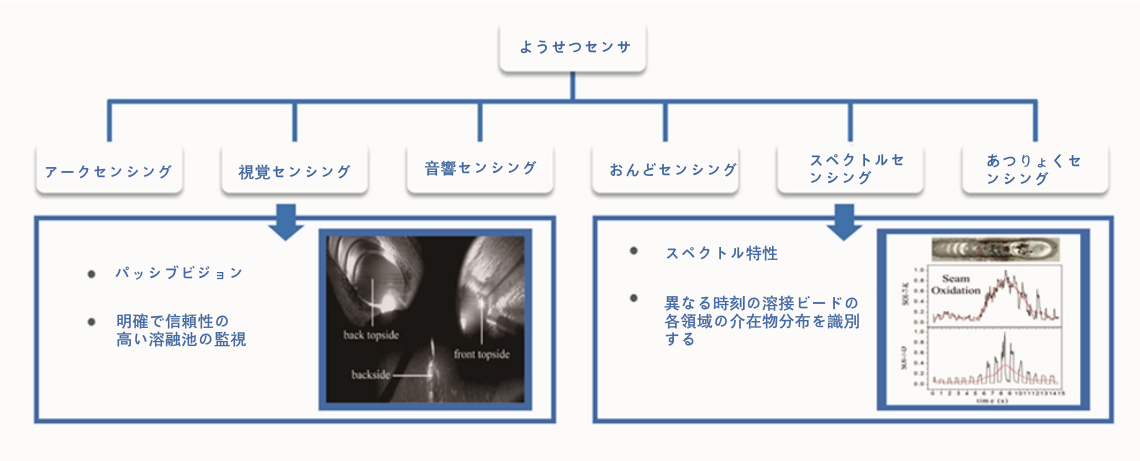
自己感知——アーク感知、視覚感知、スペクトル感知技術(shù)を利用して、溶接過程中の各タイプのパラメータ情報を抽出する。
適応――ファジィ制御、専門家制御などのアルゴリズムに基づいて、溶接モデルを結(jié)合して、溶接軌跡とパラメータの適応を?qū)g現(xiàn)する。
自己調(diào)節(jié)——溶接センシングフィードバック情報に基づいて、リアルタイムで溶接パラメータと軌跡を調(diào)節(jié)し、信頼できる溶接を?qū)g現(xiàn)する。